步進電機作為一種將電脈沖信號轉換為角位移的執行元件,因其定位精確、控制方便、無累積誤差等特點,在工業自動化、精密儀器、消費電子等領域得到了廣泛應用。以單片機為核心構建的步進電機控制系統,憑借其成本低、設計靈活、功能強大的優勢,成為當前電機控制領域的主流解決方案之一。
一、系統總體設計框架
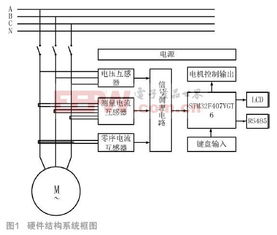
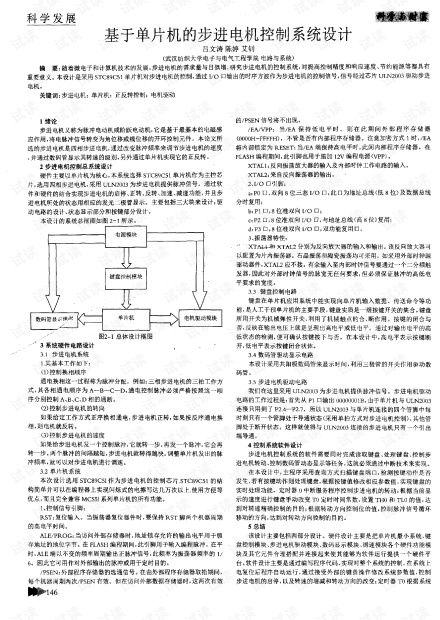
一個典型的基于單片機的步進電機控制系統主要由以下幾個核心部分組成:
- 控制核心(單片機):通常采用如STC89C52、STM32或Arduino等系列單片機。它負責接收上位機指令或處理傳感器信號,生成并輸出符合時序要求的脈沖序列和方向控制信號,是整個系統的“大腦”。
- 驅動模塊:這是連接單片機弱電控制信號與步進電機強電功率的關鍵環節。常見的驅動芯片包括L298N、ULN2003(用于小型電機)以及更專業的A4988、DRV8825等細分驅動芯片。驅動模塊將單片機的邏輯電平放大,以提供電機繞組所需的足夠電流和電壓。
- 步進電機:作為執行終端,其類型(如兩相、四相混合式步進電機)和參數(步距角、額定電流)決定了系統的基本性能指標。
- 人機交互與通信模塊:可能包含按鍵、液晶顯示屏(LCD)用于本地控制和狀態顯示,以及UART、CAN等接口用于與PC或其他控制器通信,實現更復雜的控制邏輯和參數設置。
- 電源模塊:為單片機、驅動電路和電機提供穩定、隔離的電源,確保系統穩定運行。
二、關鍵技術與控制策略
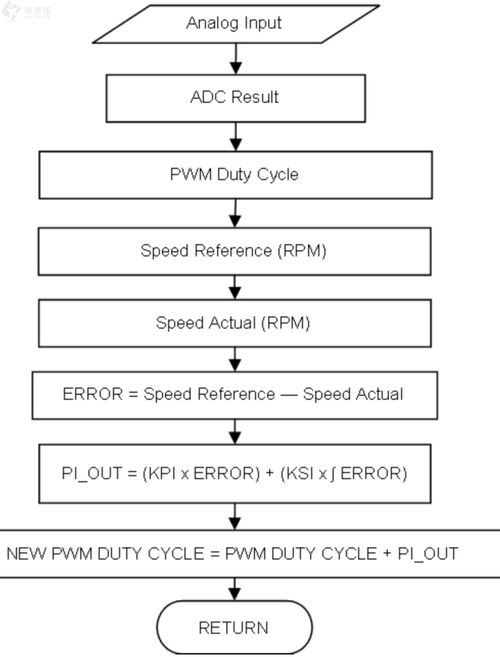
- 脈沖分配與速度控制:單片機通過定時器中斷精準地生成脈沖(CP)信號。通過改變定時器的定時常數,可以靈活調節脈沖頻率,從而實現電機轉速的平滑控制(加減速曲線)。方向(DIR)信號則決定電機旋轉方向。
- 細分驅動技術:采用A4988等細分驅動器,通過對電機繞組電流進行微步控制,將一個整步細分為多個微步。這能顯著提高運動平滑性、減少振動和噪音,并提升系統的分辨率和定位精度。
- 閉環控制(可選與進階):基礎的開環控制系統簡單可靠,但在負載突變時可能存在失步風險。通過增加光電編碼器等位置/速度傳感器,構成位置或速度閉環反饋,可以實時修正誤差,實現更高精度的伺服控制,提升系統的動態響應和抗干擾能力。
三、研發流程與資源獲取
系統的研發流程通常遵循“需求分析->硬件選型與電路設計->軟件編程與調試->系統聯調與優化”的路徑。
對于學習者和研發工程師而言,豐富的參考資料至關重要。網絡上存在大量相關的設計文檔、源代碼和原理圖。例如,在技術社區如CSDN上,可以搜索并下載到諸如“基于單片機的步進電機控制系統設計 1.pdf”之類的詳細設計文檔。這些資源通常包含完整的系統方案、電路原理圖、PCB設計以及C語言或匯編語言的驅動程序代碼,為快速入門和項目開發提供了極大的便利。
四、電機及其控制系統研發的廣闊前景
隨著智能制造和物聯網(IoT)的發展,步進電機控制系統的研發正朝著更智能化、網絡化、集成化的方向演進。具體趨勢包括:
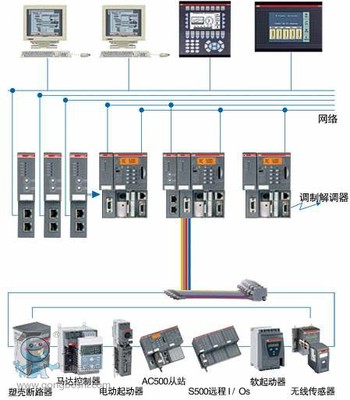
- 集成化與模塊化:將控制器、驅動器、通信接口甚至電源高度集成,形成即插即用的智能電機模塊。
- 高級算法應用:融入自適應控制、模糊PID等先進算法,以應對更復雜的工況。
- 網絡化控制:通過EtherCAT、Modbus等工業總線或無線技術,實現電機的遠程集群控制和狀態監控。
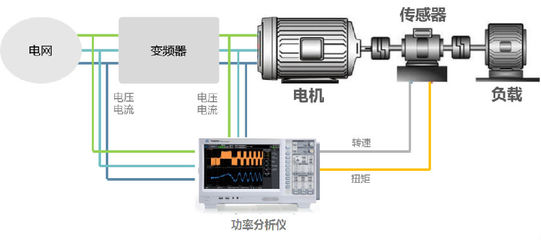
- “電機+傳感器”深度融合:結合機器視覺、力覺傳感器,賦予系統更強大的環境感知與自適應能力,拓展在機器人、精密裝配等高端領域的應用。
基于單片機的步進電機控制系統是連接數字世界與物理運動的關鍵橋梁。深入理解其硬件構成、驅動原理和控制邏輯,并善用現有的開源技術資源,是進行相關研發的堅實基礎。隨著技術的不斷融合與創新,這一經典控制系統將繼續在自動化浪潮中扮演核心角色,驅動未來智能制造向前發展。