隨著海洋資源勘探與開發的不斷深入,深海作業設備的需求日益增長,其中高可靠、長距離的電機驅動與控制技術是關鍵一環。本文聚焦于基于意法半導體(ST)經典款微控制器STM32F103的深海遠程電機控制系統的研發,涵蓋系統架構設計、硬件選型、軟件算法實現以及深海環境適應性等核心內容。
一、 系統總體設計
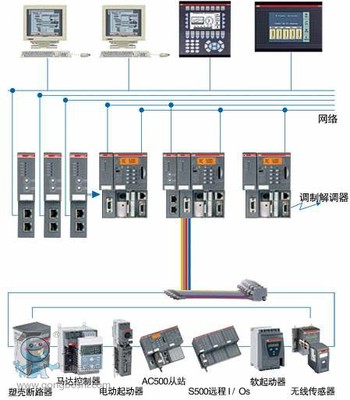
本系統旨在實現對深海環境下電機的精確、可靠和遠程控制。系統采用主從式架構:
- 水面主控單元:位于水面船只或平臺上,負責發送控制指令(如啟動、停止、轉速設定、轉向等)和接收狀態反饋。它通過長距離通信鏈路(如水聲通信或光電復合纜)與水下單元交互。
- 水下執行單元:核心為基于STM32F103的下位機控制器。它接收水面指令,執行電機控制算法,驅動功率模塊,并實時采集電機電流、電壓、溫度及深度等傳感器信息,回傳至水面。
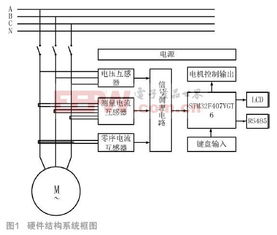
二、 硬件平臺設計
- 核心控制器:選用STM32F103系列微控制器,憑借其Cortex-M3內核的高性能、豐富的外設(多路定時器用于PWM生成與編碼器接口,ADC用于采樣,多個USART用于通信)和良好的工業級可靠性,是成本與性能均衡的理想選擇。
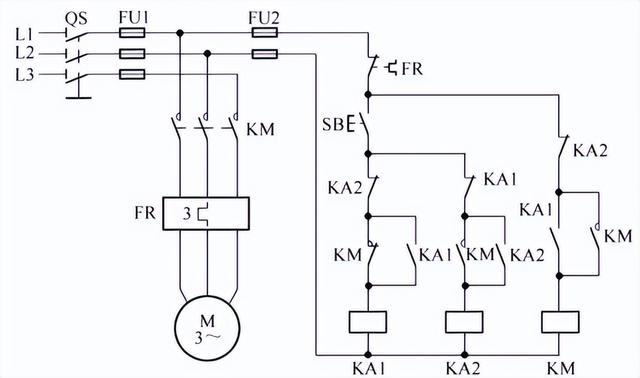
- 電機驅動與功率模塊:根據深海電機(通常為無刷直流電機或永磁同步電機)的功率需求,選用耐高壓、大電流的IPM(智能功率模塊)或分立IGBT/MOSFET搭建的三相全橋驅動電路。驅動電路需具備過流、過壓、過熱保護功能。
- 通信接口模塊:
- 遠程通信:集成水聲調制解調器模塊或光纖通信接口,以應對海水對無線電信號的強烈衰減,實現數千米級指令與數據透傳。
- 本地通信:STM32F103通過UART或CAN總線與傳感器、驅動板進行可靠數據交換。
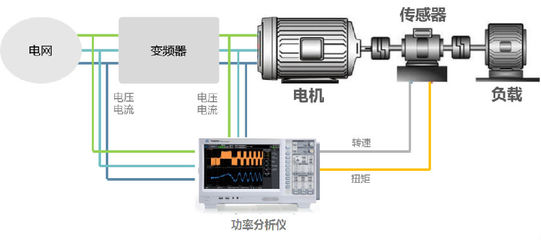
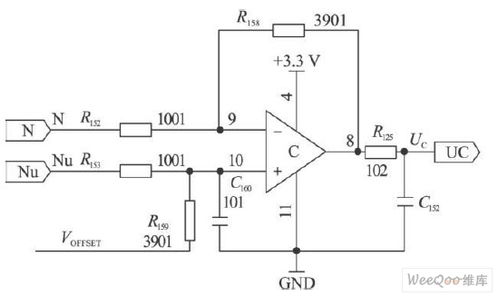
- 傳感器與信號調理:集成霍爾電流傳感器、旋轉變壓器或光電編碼器用于電機狀態檢測;壓力傳感器用于深度感知;溫度傳感器用于監控關鍵部件。所有信號需經過濾波、放大、隔離等調理以適應水下噪聲環境。
- 電源與耐壓密封設計:設計寬壓輸入(如24V-400V DC)的開關電源,為各模塊提供穩定隔離電源。整個水下單元必須置于高強度耐壓密封艙內,艙體采用耐腐蝕材料(如鈦合金),并通過壓力測試。
三、 軟件算法與控制系統實現
在STM32F103上實現實時控制固件:
- 實時操作系統(RTOS):采用FreeRTOS或μC/OS-II,以多任務形式管理通信解析、控制算法執行、數據采集與故障處理,確保系統實時性與可靠性。
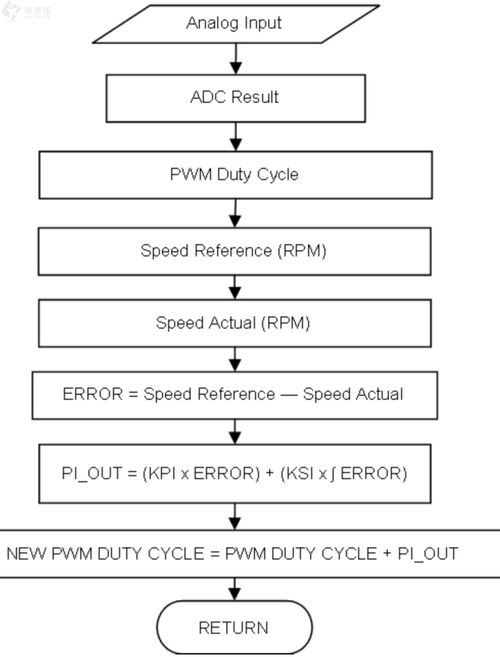
- 電機控制算法:
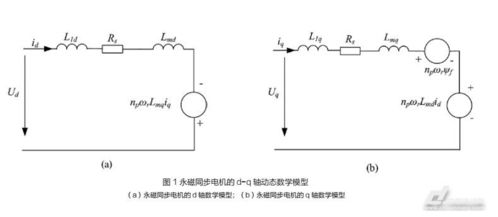
- 對于BLDC電機,采用六步方波控制或更先進的FOC(磁場定向控制)算法。FOC能實現更平滑的轉矩和更高的效率,但其SVPWM(空間矢量脈寬調制)和Clark/Park變換對STM32F103的計算能力提出一定要求,需進行精心優化。
- 實現速度環、電流環的雙閉環PID控制,參數可根據負載和水下工況進行自適應整定或遠程調整。
- 通信協議:定義精簡、可靠且帶有差錯校驗(如CRC)的幀協議,用于水面與水下的指令、數據包傳輸。協議需考慮長延遲、低帶寬和可能的數據包丟失問題,加入應答與重傳機制。
- 故障診斷與保護:軟件層面實現全面的故障監控,包括堵轉檢測、過流保護、通信超時、傳感器失效等。一旦觸發,系統能自動進入安全狀態(如停機)并上報。
四、 深海環境適應性關鍵技術
- 高壓防護:所有電子元器件、PCB及接插件均需選擇耐高壓、耐腐蝕的型號,并進行嚴格的灌封處理,以抵御數十兆帕的靜水壓力。
- 熱管理:密封艙內空間有限,散熱困難。需通過熱仿真優化布局,采用導熱材料將關鍵發熱元件(如功率器件)的熱量傳導至艙壁,或考慮引入小型循環冷卻系統。
- 可靠性設計:選用軍品級或工業級元器件,進行降額設計。軟件加入看門狗、內存自檢等機制。進行HALT(高加速壽命試驗)與環境應力篩選,模擬深海高壓、低溫環境。
- 能源效率:優化控制算法降低電機損耗,采用高效率電源模塊,并在待機時進入低功耗模式,以延長水下設備的自持時間。
五、 與展望
基于STM32F103的深海遠程電機控制系統,通過合理的軟硬件協同設計,能夠滿足深海極端環境下的基本驅動需求。其優勢在于MCU的高性價比與成熟生態,以及系統架構的清晰與可擴展性。未來研發可朝以下方向深化:
- 升級至性能更強大的STM32F4/H7系列,以支持更復雜的多電機協同控制與先進算法(如無傳感器控制)。
- 集成人工智能邊緣計算能力,實現本地智能故障預測與自適應控制。
- 進一步研究水下無線能量傳輸技術,減少對電纜的依賴。
該系統的成功研發,將為水下機器人(ROV/AUV)、深海鉆探、海底觀測網等裝備提供核心的動力與控制解決方案,助力我國深海科技的自主化與產業化進程。